I hold a Ph.D. from South China University of Technology (advised by Prof. Ping Zhang), with research spanning embodied intelligence, robotic manipulation, active perception, reinforcement learning, and 3D point cloud understanding. I have published 7 first-author papers at IJCAI, AAAI, TNNLS, ICASSP, and ICME (4 Oral). I now work at Astribot as an Embodied Intelligence Algorithm Engineer, building VLA training pipelines and applying RL and world models to dual-arm manipulation.
South China University of Technology, School of Computer Science and Engineering
South China University of Technology, School of Mechanical and Automotive Engineering
Undergraduate studies in mechanical engineering.
Astribot, Shenzhen
Algorithm
AI Infra
Honors
Guangdong HYNN Technology Co., Ltd.
Mechanical design and engineering.
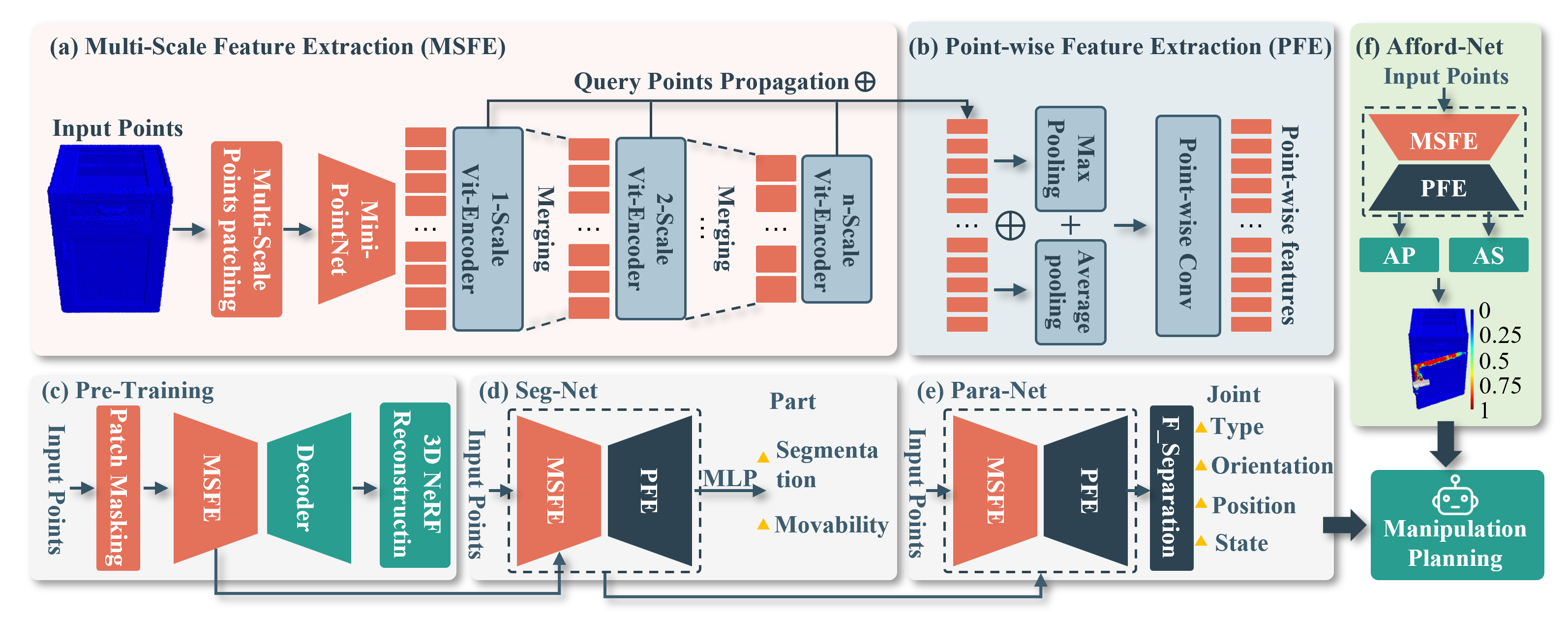
Generalized Manipulation of Articulated Objects Using Pre-trained Model. Leverages pre-trained visual models for generalizable robotic manipulation of articulated objects.
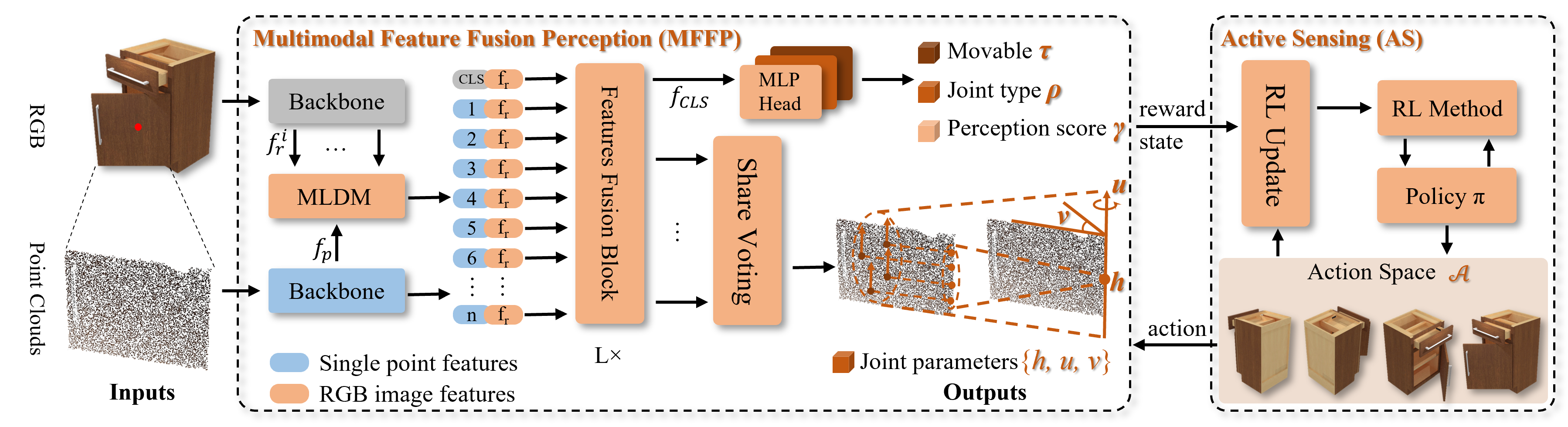
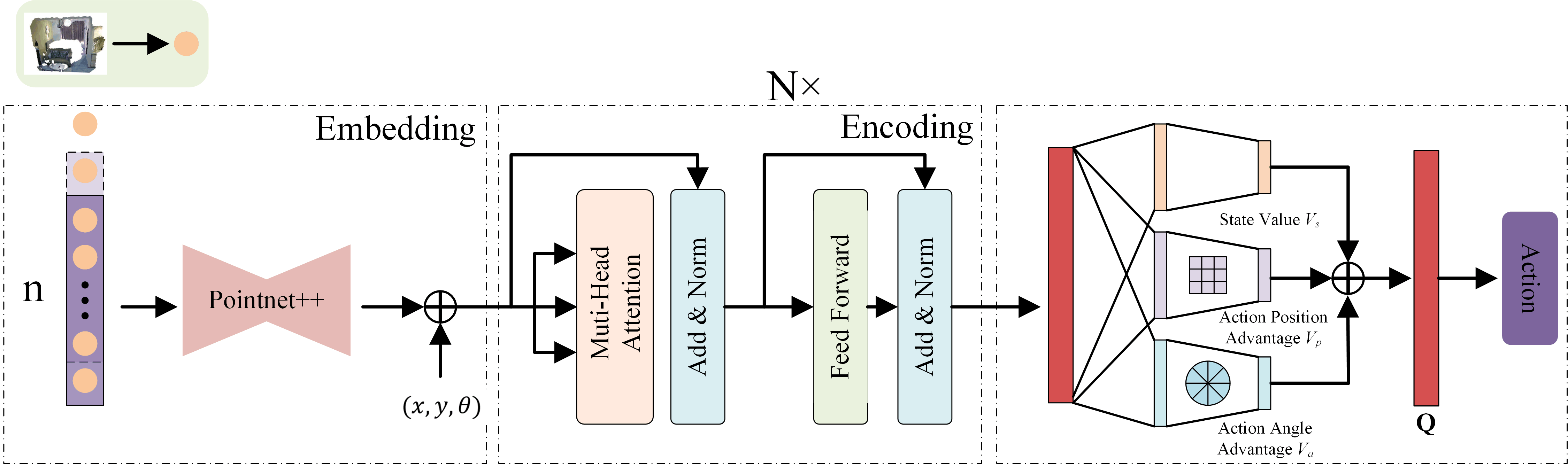
Multimodal Active Robotic Sensing for Articulated Characterization. A framework that enables robots to actively perceive and characterize articulated objects through multimodal sensing.
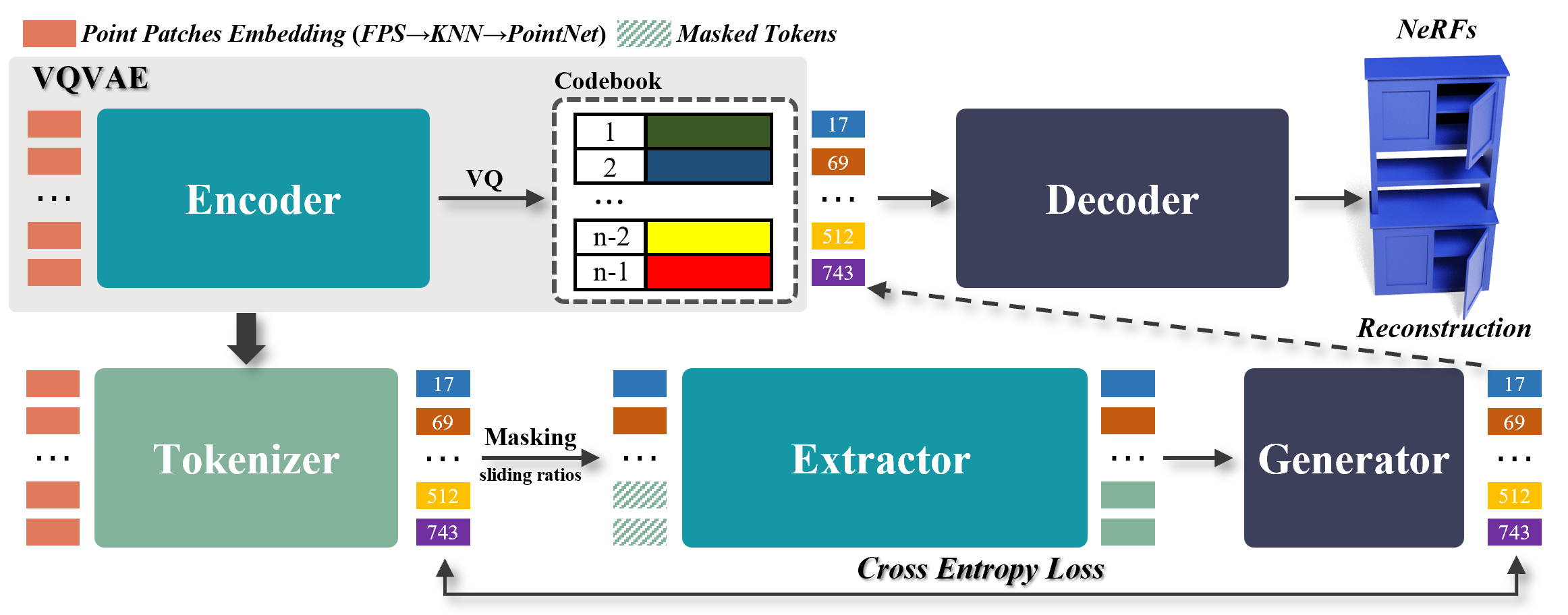
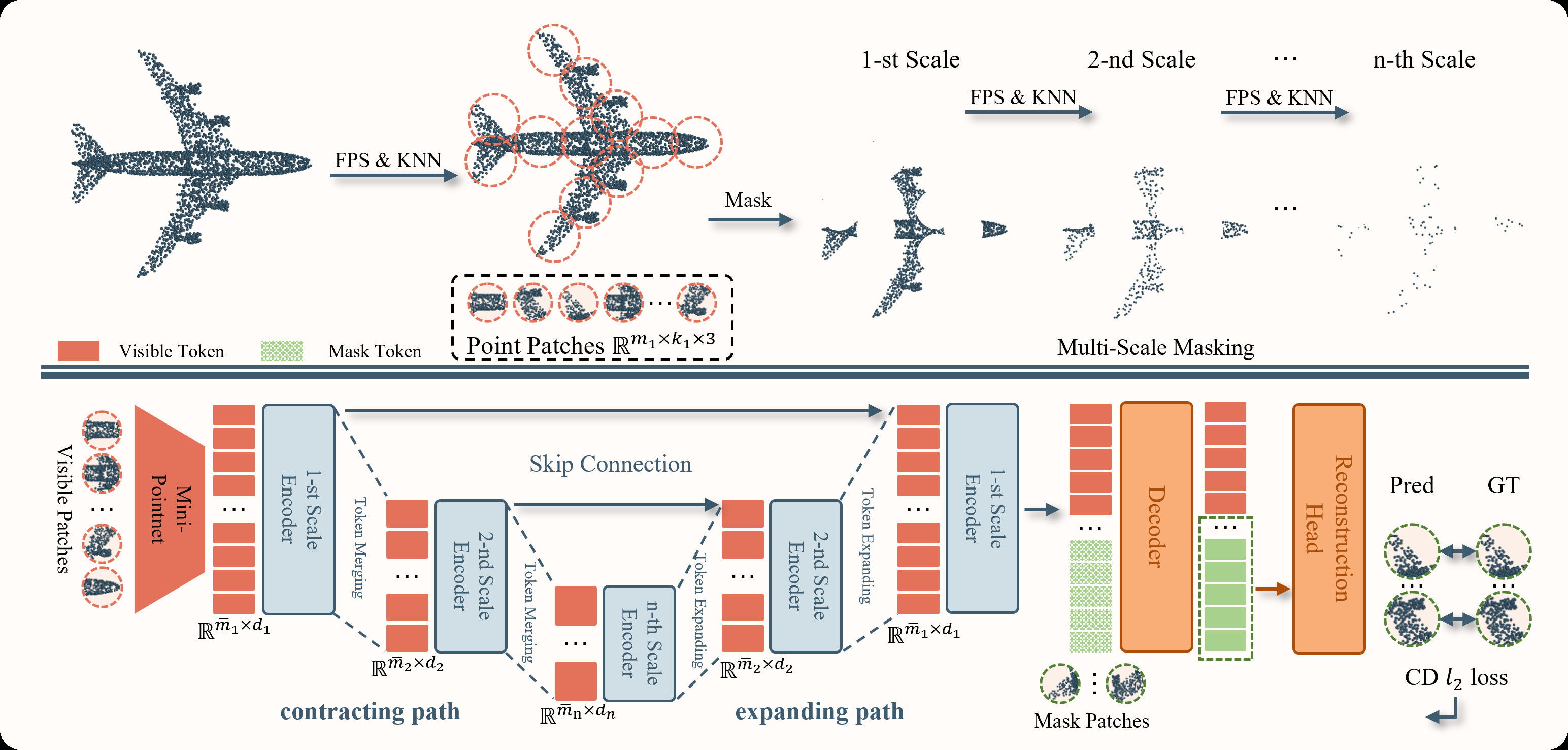
Masked Generative Extractor for Synergistic Representation and 3D Generation of Point Clouds. A joint framework combining point cloud representation learning with 3D shape generation.
FAEMTrack: Feature-Augmented Embedding and Cross-Drone Fusion for Single Object Tracking
IEEE Internet of Things Journal, 2025
Multi-objective Neural Architecture Search Combining Binary Artificial Bee Colony Algorithm for Dynamic Hand Gesture Recognition
Expert Systems with Applications, 2025
Reinforcement Learning-Driven Dual Neighborhood Structure Artificial Bee Colony Algorithm for Continuous Optimization Problem
Applied Soft Computing, 2024